このROS Controlについて
実際にはメンテナンスされていません。 ROSロボットの遠隔制御と視覚化
実際にはメンテナンスされていません。
ROS Controlを使用して、Robot Operating System(ROS)上で実行されている移動ロボットからのリアルタイム制御センサーデータの遠隔制御、指令、および視覚化。
特徴:
- ジョイスティックやチルト制御を含む複数の遠隔操作制御オプション
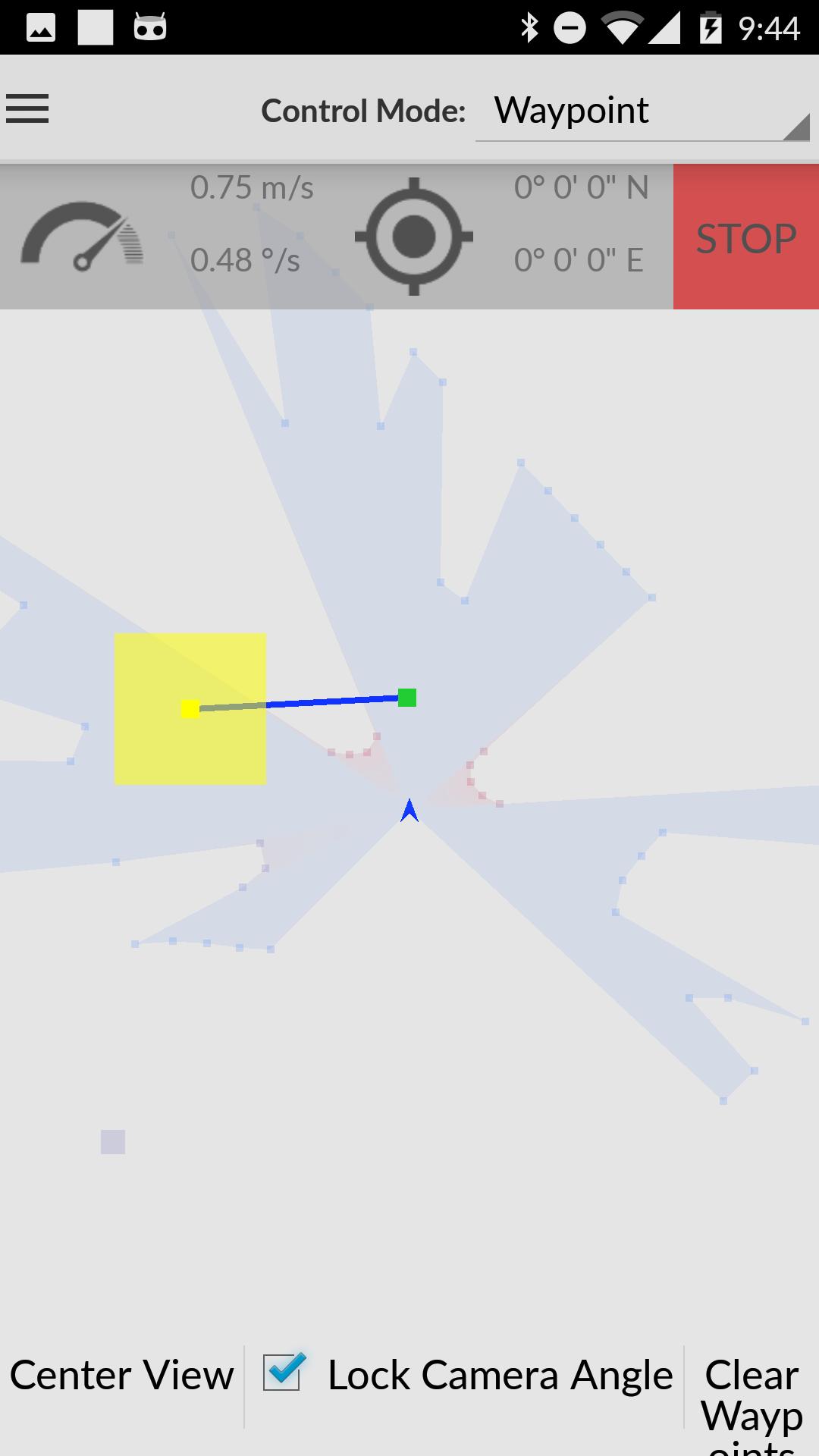
- ウェイポイント計画とナビゲーション
- リモートカメラビュー
- レーザースキャン可視化
- GPSデータと地図表示
- ロボット間の最大限の互換性のための保存可能で設定可能な接続設定
開発者向け:
このアプリに貢献してお気軽に!
ソースコード:
https://github.com/mtbii/RobotCA
アプリの追加情報
最新バージョン 1.0 の更新情報
Last updated on 2016年07月09日
Minor bug fixes and improvements. Install or update to the newest version to check it out!
ROS Control スクリーンショット







ROS Controlの旧バージョン
4.5 MB2016年07月09日





