关于ROS Map Navigation (Hydro)
使用地图导航与您的ROS功能的机器人。
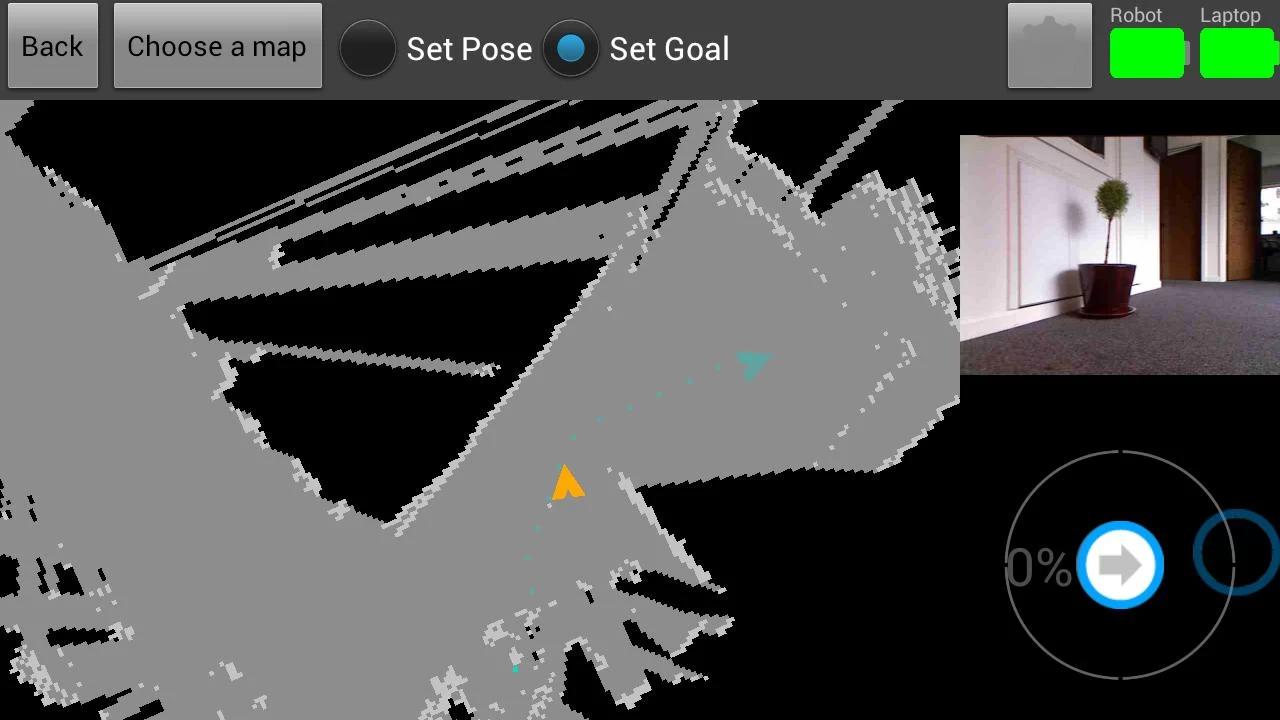
Use a map to navigate with your ROS-enabled robot.
There are 2 basic operations:
- Set Pose: allows you to change the estimated pose of the robot.
- Set Goal: allows you to send the robot somewhere in the map.
Wiki available here:
http://www.ros.org/wiki/android_map_nav
Source code:
https://github.com/rosjava/android_apps
Issue tracker:
https://github.com/rosjava/android_apps/issues
更多应用信息
最新版本1.0更新日志
Last updated on 2015年09月14日
Minor bug fixes and improvements. Install or update to the newest version to check it out!
ROS Map Navigation (Hydro) 屏幕截图

ROS Map Navigation (Hydro)历史版本
2.1 MB2015年09月14日





